Chiński wysokiej jakości robot spawalniczy MIG do spawania stali nierdzewnej







Ciało robota
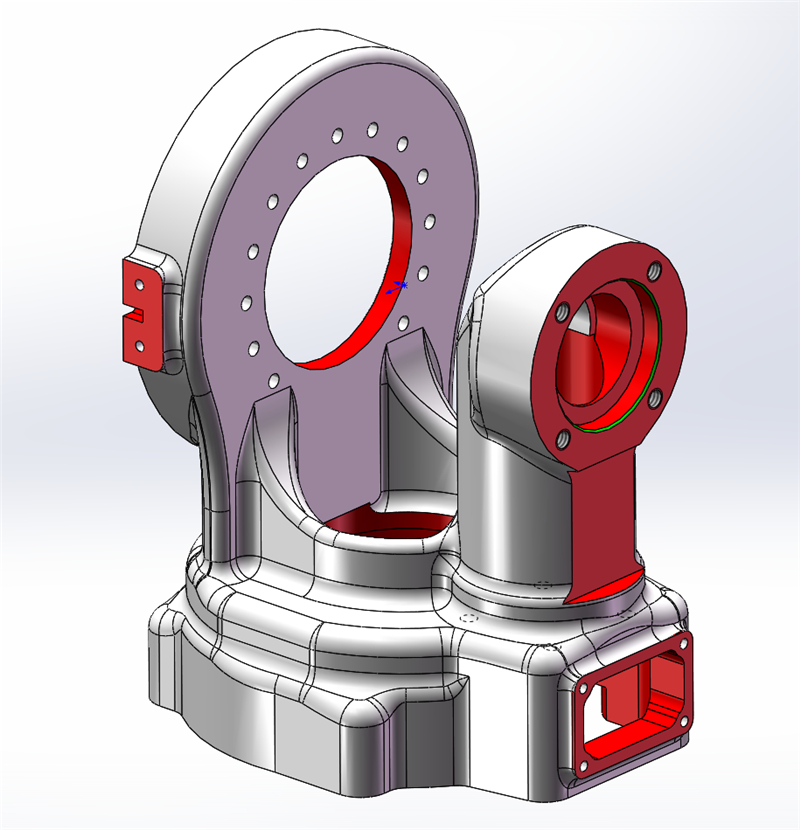
Robot JHY zmienia się głównie w procesie odlewania ciśnieniowego i szczegółowym projekcie korpusu. Nasz zespół badawczo-rozwojowy wprowadził wiele innowacji w projekcie korpusu robota, uzyskując ponad dziesięć nowych patentów na wynalazki.
Na przykład, szósta oś opracowała wysoce precyzyjny mechanizm przekładni i pręty wzmacniające, a tarcza wyjściowa szóstego koła ma konstrukcję bezprzekładniową, co znacznie poprawiło dokładność i stabilność robota. Nawet jeśli palnik spawalniczy pracuje w trudnej pozycji, nadal zapewnia stabilność i zapobiega drganiom. Potwierdzili to nasi klienci w kraju.
Korpus robota jest produkowany w technologii odlewania ciśnieniowego, dzięki czemu nasze roboty charakteryzują się większą gęstością i są lżejsze. Przedramię może być węższe i dłuższe. Stosunek ramienia do przedramienia jest bliższy złotemu podziałowi, dzięki czemu roboty poruszają się szybciej i są bardziej elastyczne.
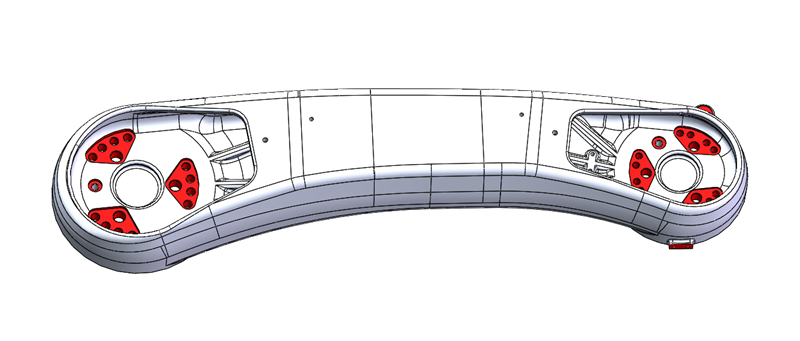
Projekt konspektu
Konstrukcja prostego przedramienia robota jest prostsza i elegancka. Dzięki wyczuciu wzornictwa jest bardziej zgodna z estetyką rynku europejskiego. Konstrukcja korpusu robota objęta jest szeregiem patentów technicznych, dzięki czemu nowy korpus robota jest doskonalszy.
Najlepsza marka przewodów
Wewnętrzne przewody i zaciski robota pochodzą od najlepszych japońskich marek: DYEDEN, TAIYO, ABB i Fanuc.
Terminal: włoska marka Yierma.
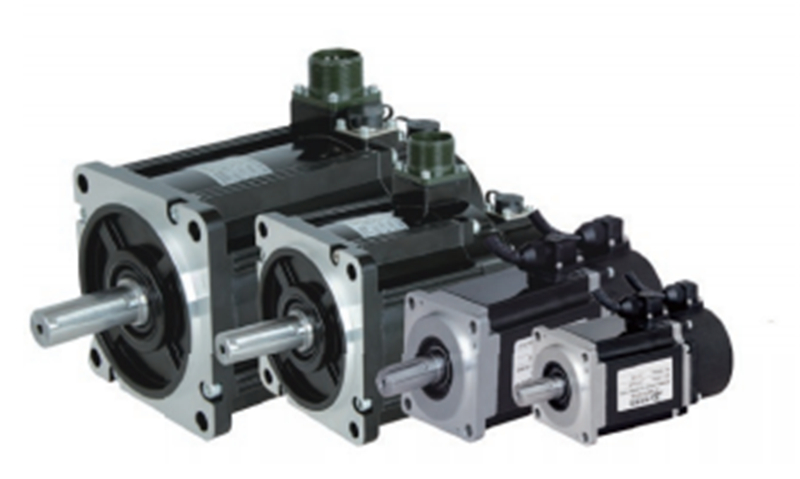
Wiodące marki silników serwo / sterowników / reduktorów
Wszystkie z nich korzystają z wiodących marek w Chinach. Każda marka była długo testowana i badana przed podjęciem ostatecznej decyzji, aby upewnić się, że te marki nadają się do użytku z naszymi robotami, a ich jakość i wydajność są stabilne i niezawodne.
Osie J1 i J2 wykorzystują konstrukcję trzech wałów mimośrodowych o momencie obrotowym do 65 Nm, co zmniejsza zużycie przekładni i wydłuża żywotność reduktora. Reduktory osi J1 i J3 robota JHY są obecnie najnowocześniejszą konfiguracją w Chinach.
Jeśli chodzi o serwomotor, obecnie w robotach stosujemy maksymalnie silniki o mocy 3 kW.
W przypadku robotów o długości 1,8 m i 2 m siła napędowa potrzebna do poruszania 1. i 2. osią jest większa, a wymagania dotyczące mocy silnika są również wyższe.
Silniki o wysokiej precyzji i wielu specyfikacjach są w stanie w pełni sprostać wymaganiom aplikacji naszego robota.

3 lata/7500 godzin bezobsługowej pracy
Konserwacja jest prosta, klienci mogą ją z łatwością obsługiwać sami.
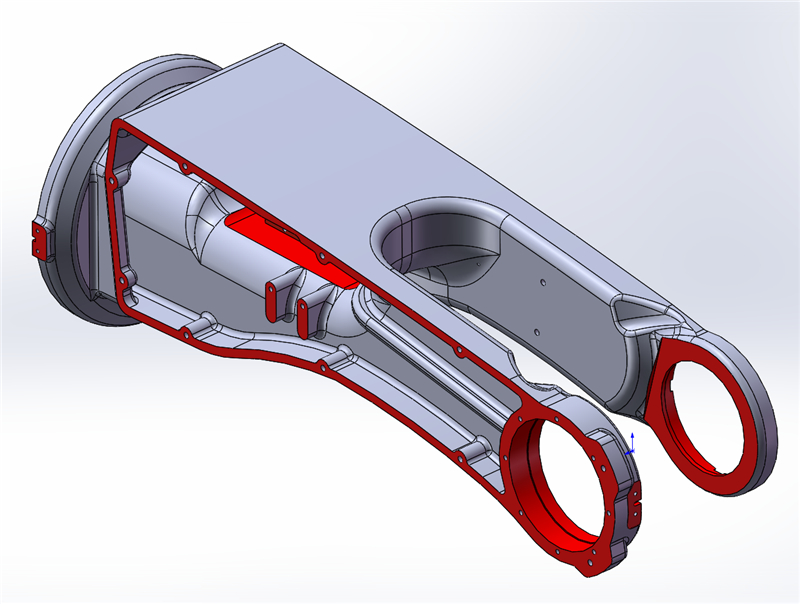
Inne patenty i wzory
Przekładnia wtórna 6-osiowa. Zmieniono ją na dwa połączenia pasowe, zwiększono przełożenie i rozwiązano problem zbyt szybkiego i niedokładnego ruchu 6 osi. Tarcza wyjściowa szóstej osi została zaprojektowana bez przekładni, z precyzyjnym mechanizmem przekładni, co poprawia dokładność ruchu szóstej osi... Obecnie posiadamy ponad 30 patentów związanych z robotem spawalniczym.
Wideo
Parametry
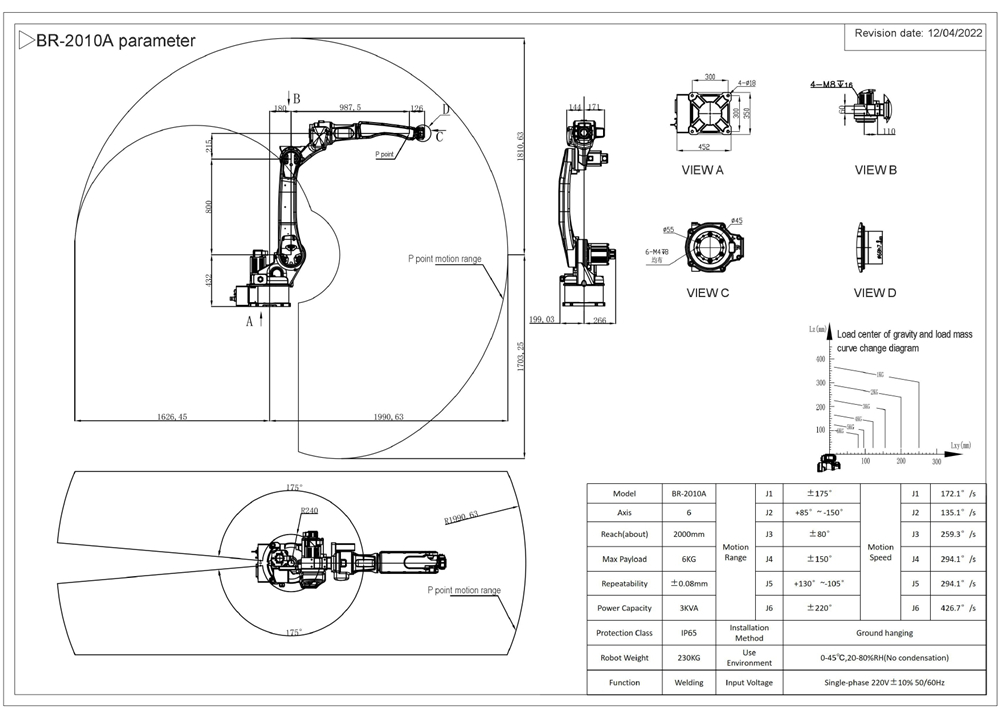
| Model | BR-2010A | Zakres ruchu | J1 | ±175° | Prędkość ruchu | J1 | 172,1°/s |
| Oś | 6 | J2 | +85°~ -150° | J2 | 135,1°/s | ||
| Zasięg (około) | 2000 mm | J3 | ±80° | J3 | 259,3°/s | ||
| Maksymalna ładowność | 6 kg | J4 | ±150° | J4 | 294,1°/s | ||
| Powtarzalność | ±0,08 mm | J5 | +130°~-105° | J5 | 294,1°/s | ||
| Pojemność mocy | 3 kVA | J6 | ±220° | J6 | 426,7°/s | ||
| Klasa ochrony | IP65 | Metoda instalacji | Wiszące na ziemi | ||||
| Waga robota | 230 kg | Użyj środowiska | 0-45℃, 20-80% RH (bez kondensacji) | ||||
| Funkcjonować | Spawalniczy | Napięcie wejściowe | Jednofazowy 220 V ± 10% 50/60 Hz | ||||
Kategorie produktów
-

6-osiowy robot spawalniczy MIG o niskim rozprysku, zakres 1800 mm
-

Robot spawalniczy MIG MAG 6 osi, zakres 1500 mm z ...
-

Wysokiej jakości robot spawalniczy używany do spawania mebli
-

JHY 6-osiowe ramię robota, automatyczny robot łukowy...
-

Robot spawalniczy o zasięgu 2000 mm do spawania stali węglowych...
-

Robot spawalniczy MIG o rozpiętości 2000mm do spawania stali nierdzewnych...